
| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
╚╦╣żųŪ─▄Ż©AIŻ®╝╝ąg░ńč▌ų°ų┴ĻPųž ꬥ─ĮŪ╔½ĪŻ┤¾─Żą═į┌╠ß╔²║═ųž╦▄ÖCŲ„╚╦Į╗╗ź─▄ ┴”ęį╝░ī”▓┘ū„║═ęŲäė─▄┴”Ą─Ė─▀MĘĮ├µČ╝š╣¼F│÷ ┴╦Š▐┤¾Ą─═Ųäė┴”ĪŻAI╝╝ąg▓╗āH×ķÖCŲ„╚╦╠ß╣®┴╦Ė³ ╔Ņīė┤╬Ą─Š▀╔ĒīW┴Ģ▀M╗»─▄┴” Ż¼═¼śė╩╣Ųõ─▄ē“▀M ąąĖ³Å═ļsĄ─╚╬äš║═Ė³ūį╚╗Ą─Į╗╗ź Ż¼ę▓×ķīŹ¼F╚½ ŚŻ╩ĮųŪ─▄╔·æB╠ß╣®┴╦▒žę¬Ą─╗∙ĄAĪŻ
• Ėąų¬─▄┴”╠ß╔²Ż║AI─▄ē“═©▀^╔ŅČ╚īW┴Ģ║═ėŗ╦ŃÖC ęĢėX╝╝ągŻ¼Å─ČÓĘNé„ĖąŲ„Ż©╚ńözŽ±Ņ^Īó╝ż╣Ō└ū ▀_Īó┬Ģę¶é„ĖąŲ„Ą╚Ż®½@╚Ī║═Ęų╬÷öĄō■ĪŻ▀@╩╣Ą├ ÖCŲ„╚╦─▄ē“Ė³£╩┤_Ąž└ĒĮŌ║═ūRäeų▄ć·ŁhŠ│Ż¼░³ └©╬’¾wĪ󚎥K╬’║═╚╦ŅÉė├æ¶Ż¼▀MČ°▀MąąĖ³×ķÅ═ ļsĄ─Į╗╗źĪŻ
• ūį╚╗šZčį╠Ä└Ē Ż║A I ╝╝ągųąĄ─ūį╚╗šZčį╠Ä└Ē Ż©NLPŻ®╩╣Ą├ÖCŲ„╚╦─▄ē“└ĒĮŌ║═╔·│╔ūį╚╗šZ čįŻ¼▀@×ķ╚╦┼cÖCŲ„ų«ķgĄ─Į╗╗ź╠ß╣®┴╦▒Ń└¹ĪŻė├ æ¶┐╔ęį═©▀^šZę¶ųĖ┴Ņ┼cÖCŲ„╚╦Į╗┴„Ż¼ÖCŲ„╚╦ät ─▄ē“└ĒĮŌ▓óĒææ¬▀@ą®ųĖ┴ŅŻ¼Å─Č°īŹ¼FĖ³ūį╚╗Ą─ ╚╦ÖCĮ╗╗źĪŻ
• ČÓ─ŻæB╚┌║ŽŻ║AI─▄ē“š¹║ŽüĒūį▓╗═¼Ėą╣┘Ą─öĄō■ Ż©╚ńęĢėXĪó┬ĀėX║═ė|ėXŻ® Ż¼═©▀^─ŻæBķgĄ─╗źča ║═╚┌║ŽŻ¼╠ß╔²ī”ŁhŠ│Ą─└ĒĮŌĪŻ└²╚ńŻ¼ÖCŲ„╚╦┐╔ęį ═¼Ģr╩╣ė├łDŽ±ūRäe┼c┬Ģę¶ūRäeüĒ┤_Č©─┐ś╦╬’¾w Ą─ĘĮ╬╗║═ąį┘|Ż¼īŹ¼FĖ³╝ėųŪ─▄Ą─ī¦║Į║═▓┘ū„ĪŻ
• īŹĢrøQ▓▀─▄┴”Ż║AIĄ─īŹĢrėŗ╦Ń║═øQ▓▀─▄┴”╩╣Ą├ ÖCŲ„╚╦┐╔ęį╗∙ė┌½@╚ĪĄ─ČÓ─ŻæBą┼Žó╝┤Ģrū÷│÷Ę┤ æ¬ĪŻ▀@ĘN┐ņ╦┘Ę┤æ¬─▄┴”į┌äėæBŁhŠ│ųąė╚×ķųžę¬Ż¼ ╚ńį┌╚╦╚║ųą▒▄ūī╗“į┌▓╗┤_Č©Śl╝■Ž┬ł╠ąą╚╬äšĪŻ
• ūį▀mæ¬īW┴ĢŻ║AI═©▀^ÖCŲ„īW┴Ģ╦ŃĘ©Ż¼┐╔ęįĖ∙ō■ ė├æ¶Ą─Ę┤ü║═ŁhŠ│Ą─ūā╗»│ų└mĖ³ą┬║═ā×╗»Į╗╗ź ▓▀┬įŻ¼╩╣Ą├ČÓ─ŻæBĮ╗╗źĖ³╝ėĒśĢ│║═Gą¦ĪŻ
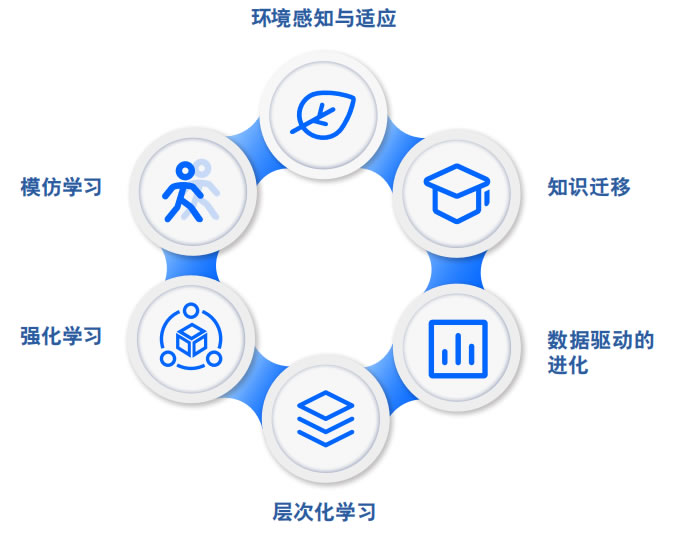
• ─ŻĘ┬īW┴ĢŻ║AI─▄ē“═©▀^ė^▓ņ╚╦ŅÉ▓┘ū„╗“Ųõ╦¹ųŪ ─▄¾wĄ─ąą×ķüĒīW┴Ģ╚╬äšĪŻ▀@ĘN─ŻĘ┬īW┴Ģ┐╔ęį┐ņ ╦┘ūīÖCŲ„╚╦šŲ╬š╗∙▒ŠĄ─▓┘ū„╝╝─▄Ż¼Č°¤oąĶ╩ųäė ŠÄ│╠├┐ę╗éĆ▓Į¾EĪŻ
• ÅŖ╗»īW┴ĢŻ║AI╦ŃĘ©┐╔ęį└¹ė├ÅŖ╗»īW┴Ģį┌šµīŹ╗“ Ę┬šµĄ─ŁhŠ│ųą▀MąąįćÕeīW┴ĢĪŻÖCŲ„╚╦Ė∙ō■ūį╔Ē Ą─äėū„ĮY╣¹½@Ą├¬ääŅ╗“æ═┴PŻ¼Å─Č°ų▓Įš{š¹ąą ×ķęįā×╗»╚╬äšł╠ąąĪŻ
• īė┤╬╗»īW┴ĢŻ║═©▀^įOėŗČÓīė┤╬Ą─īW┴Ģ╝▄śŗŻ¼AI ─▄ē“ĘųļAČ╬ĄžīW┴Ģ╚╬äšĪŻ└²╚ńŻ¼Ž╚īW┴Ģ║åå╬ Ą─╗∙▒Šäėū„ Ż¼╚╗║¾ųØuīW┴ĢÅ═ļsĄ─▓┘ū„╗“▓▀ ┬įŻ¼▀@ĘNĘųīėīW┴Ģ▓▀┬į┐╔ęį╠ßGīW┴Ģą¦┬╩ĪŻ
• ŁhŠ│Ėąų¬┼c▀mæ¬Ż║AIĮĶų·é„ĖąŲ„▓╗öÓ½@╚ĪŁhŠ│ öĄō■Ż¼ĮY║Ž╔ŅČ╚īW┴Ģ─Żą═Ż¼╩╣Ą├ÖCŲ„╚╦─▄ē“į┌ ▓╗öÓūā╗»Ą─ŁhŠ│ųąš{š¹ūį╔ĒĄ─ąą×ķĪŻ┤╦ĘNūį▀m æ¬─▄┴”╩╣Ųõ─▄į┌īŹļHæ¬ė├ųą┐╦Ę■▓╗┤_Č©ąįĪŻ
• ų¬ūR▀węŲŻ║AI┐╔ęį═©▀^▀węŲīW┴ĢīóÅ─ę╗éĆ╚╬äš ųą½@Ą├Ą─ų¬ūRæ¬ė├ė┌▓╗═¼Ą½ŽÓĻPĄ─╚╬äš╔ŽŻ¼▀@ ėąų·ė┌ÖCŲ„╚╦į┌ą┬ŁhŠ│╗“ą┬╚╬äšųąęįĖ³╔┘Ą─įć Õe│╔▒Š┐ņ╦┘▀mæ¬ĪŻ
• öĄō■“īäėĄ─▀M╗»Ż║AIŽĄĮy─▄ē“═©▀^┤¾┴┐Ą─öĄō■ ė¢ŠÜĖ─▀Mūį╝║Ą─īW┴Ģą¦┬╩║═ą¦╣¹ĪŻ╩╣ė├ČÓśėĄ─ ė¢ŠÜöĄō■Ż©╚ń─ŻöMöĄō■ĪóīŹļH▓┘ū„öĄō■Ż® Ż¼╩╣ Ą├ÖCŲ„╚╦─▄ē“Ė³║├Ąž└ĒĮŌÅ═ļsł÷Š░║═╚╬䚯¼▓ó │ų└m╠ß╔²ŲõŠ▀╔ĒīW┴ĢĄ──▄┴”ĪŻ
AI“īäėĄ─ČÓ─ŻæBĮ╗╗ź┼cŠ▀╔ĒīW┴Ģ─▄┴”╩Ū╬┤üĒÖCŲ„╚╦╝╝ągĄ─║╦ą─ĮM│╔ĪŻęŲäė┼c▓┘ū„─▄┴”═¼śėļx▓╗ ķ_AI╝╝ągĄ─╝ė│ųĪŻČ°į┌═©ė├Š▀╔ĒÖCŲ„╚╦Ą─░lš╣▀M │╠ųąŻ¼AI“īäėĄ─ČÓ─ŻæBĮ╗╗ź║═Š▀╔ĒīW┴Ģ─▄┴”╩╝ĮK ╩Ūųžę¬Ą─蹊┐ĘĮŽ“ĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ║╦╦ß▓╔śėÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |


